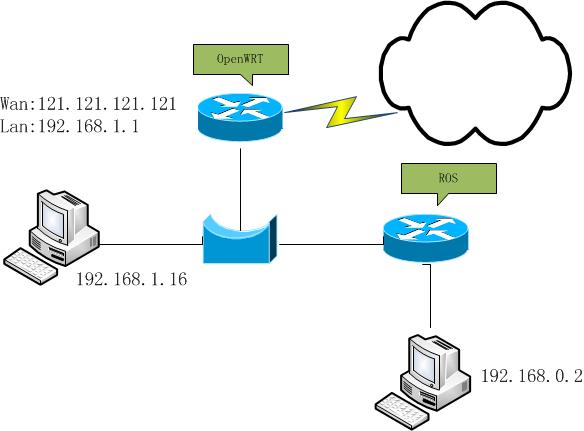
实验环境如下:
VMware新建ROS虚拟机,Wan端以桥接方式连接,IP:192.168.1.21,
Lan端以Host-only连接,IP:192.168.40.2
GNS3运行Cisco路由连接ROS Lan端,FastEthernet0/0 IP:192.168.40.3
FastEthernet0/1 IP:192.168.30.1
VMware网络查看: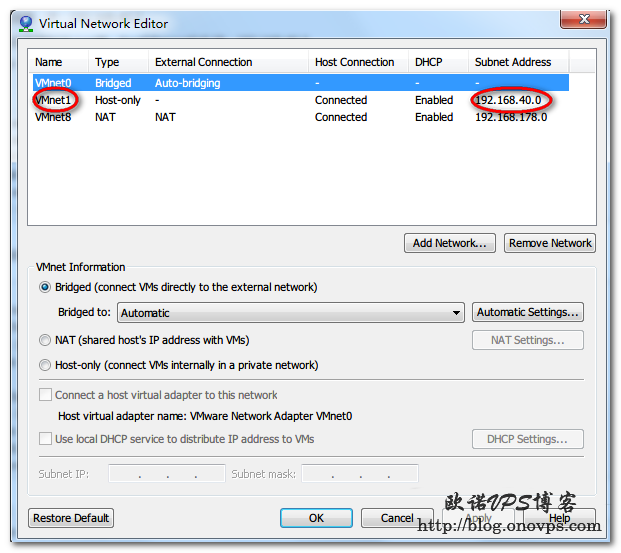
配置ROS网卡为host-only: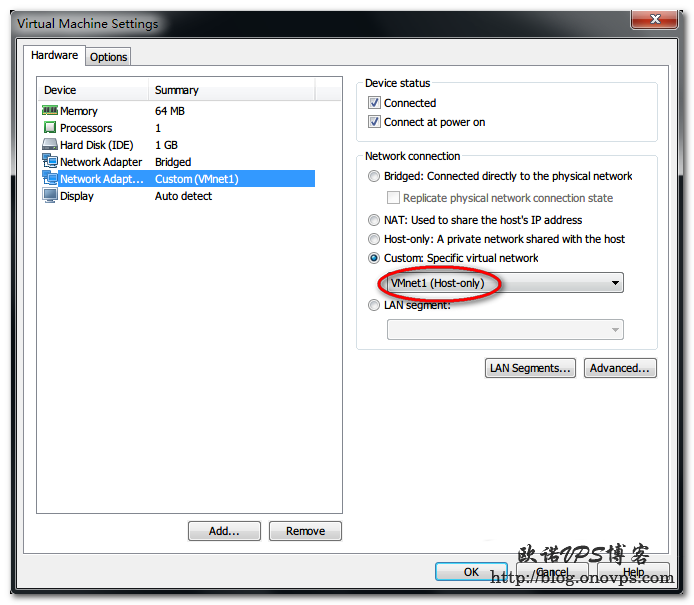
ROS内配置:
#https://www.haiyun.me
ip address add address=192.168.1.21/24 interface=ether1
ip address add address=192.168.40.2/24 interface=ether2
ip route add gateway=192.168.1.1
ip route add dst-address=192.168.30.0/24 gateway=192.168.40.3
ip dns set servers=192.168.1.1
ip firewall nat add chain=srcnat src-address=192.168.40.0/24 action=masquerade GNS3工作区,Cloud添加vmnet1(Host-only),并用连接线连接到Router FastEthernet0/0。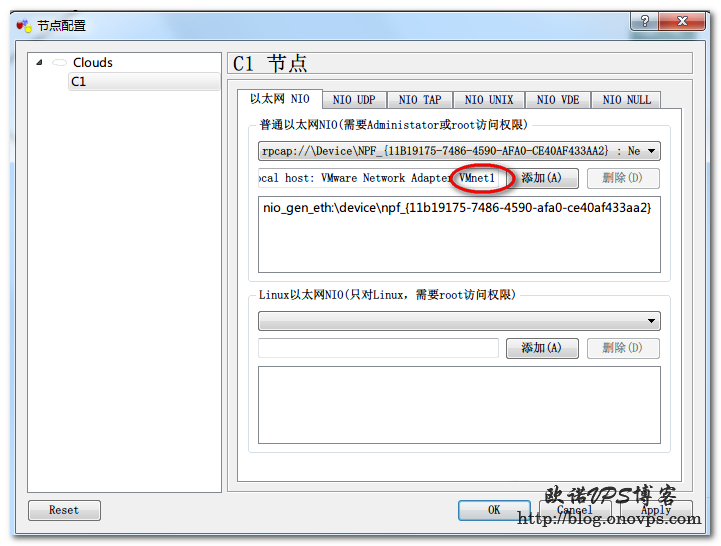
Router配置:
enable
configure terminal
interface fastEthernet 0/0
ip address 192.168.40.3 255.255.255.0
no shutdown
exit
interface fastEthernet 0/1
ip address 192.168.30.1 255.255.255.0
no shutdown
ip route 0.0.0.0 0.0.0.0 192.168.40.2
ip name-server 192.168.1.1Router内Ping测试:
Router#ping 192.168.40.2
Type escape sequence to abort.
Sending 5, 100-byte ICMP Echos to 192.168.40.2, timeout is 2 seconds:
!!!!!
Success rate is 100 percent (5/5), round-trip min/avg/max = 8/24/56 ms
Router#ping 192.168.1.1
Type escape sequence to abort.
Sending 5, 100-byte ICMP Echos to 192.168.1.1, timeout is 2 seconds:
!!!!!
Success rate is 100 percent (5/5), round-trip min/avg/max = 8/11/12 ms
Router#ping www.haiyun.me
Translating "www.haiyun.me"...domain server (192.168.1.1) [OK]
Type escape sequence to abort.
Sending 5, 100-byte ICMP Echos to 184.164.141.188, timeout is 2 seconds:
!!!!!
Success rate is 100 percent (5/5), round-trip min/avg/max = 348/354/360 ms后续也可使用VCPS虚拟PC配合GNS3进行测试。